1.2 制动能量回收系统的基本原理
制动能量回收系统是由传统制动系统发展而来的,二者的首要功能均为确保行驶中的汽车按照驾驶员的要求进行强制减速甚至停车。因此,在认识制动能量回收系统前,首先要理解传统制动系统的工作原理。
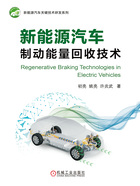
图1.2所示为传统液压盘式制动系统的结构和工作原理。传统制动系统包含制动踏板、真空助力器、制动主缸、储液罐、液压调节单元和制动器,制动器又包含制动盘、活塞、摩擦片等部件。

图1.2 传统液压盘式制动系统的结构和工作原理
当驾驶员踩下制动踏板后,真空助力器将制动踏板的输入力放大,推动主缸活塞运动,主缸活塞压缩来自储液罐的制动液,制动液经过液压调节单元流入四个车轮的制动器中,并推动制动器活塞和摩擦片运动,最终由制动器摩擦片与旋转的制动盘接触,通过摩擦片与制动盘之间的相互摩擦来阻止车轮的旋转运动,并将汽车的动能转化为摩擦副的热能耗散在大气中[4]。
根据液压管路的布置形式,传统汽车制动系统主要有一轴对一轴型(简称II型)和交叉型(简称X型)两种。如图1.3所示,II型制动的主缸前出液口与前轴两侧制动器以液压管路相连,主缸后出液口与后轴两侧制动器相连。这种布置形式最为简单,且制动稳定好;其缺点是当一套液压管路失效时,汽车有一轴完全丧失制动力,由于前后轴制动力并非按等比例分配,因此一轴失效后的制动效能将明显大于或小于常规状态的50%。X型布置则将前后轴对角线方向上的两个制动器共用一套液压管路,在任何一套管路失效时,剩余的总制动力都能保持在常规状态的50%,且前后轴的制动力分配比值保持不变,保证了制动时与整车负荷的适应性。然而这种型式,在一套管路失效后,前后轴产生的制动力并不对称,导致前轮向制动起作用车轮的一侧绕主销转动,容易使汽车失去方向稳定性。

图1.3 传统汽车制动系统的分类
综上所述,传统制动系统不论结构和管路布置形式如何,制动力均来自液压制动系统。相比之下,新能源汽车制动能量回收系统的制动力不仅来自液压制动系统,还来自再生制动系统,即制动能量回收系统由液压制动系统和再生制动系统两部分组成[5-6]。
图1.4所示为制动能量回收系统的工作原理。整车制动时,在液压制动系统向车轮提供制动力矩的同时,驱动电机进入发电状态,也向车轮提供制动力矩,将汽车制动过程中损失在摩擦制动器上的一部分热能,通过电机的发电作用转换为电能向动力蓄电池充电。这种由驱动电机作为发电机向车轮提供制动力的模式又称为电机再生制动。然而电机参与制动会对整车的其他性能产生影响,比如影响前后轴制动力的分配关系、制动强度的一致性、制动踏板感觉、制动防抱死功能等,因此,新能源汽车制动能量回收系统就是要在尽可能多地回收制动能量的同时保证整车的其他性能[7-8]。
新能源汽车制动能量回收系统基本可分为两类:一类是并联系统,其硬件结构简单,在保持传统的液压制动系统不变的基础上,叠加电机再生制动,两种制动互不影响;另一类是串联系统,串联系统通过独立调节前后轮的液压制动力,使得液压制动力和电机制动力根据总制动需求协调输出,保证制动效能。下面以驱动电机前置前轴驱动车型为例,分别对并联和串联两种制动能量回收系统进行分析介绍。

图1.4 制动能量回收系统的工作原理
并联系统的典型硬件构型如图1.5所示。当驾驶员踩下制动踏板到某个开度时,液压制动系统工作,使前后轴产生液压制动力;同时踏板位移传感器将踏板开度信号转换为电信号输入控制器,控制器中的制动能量回收模块依据踏板开度信号确定电机制动力,并向电机发出指令产生相应制动力,回收一部分制动能量并转化为电能储存在动力蓄电池中。任一时刻电机回收制动能量的多少由该时刻电机制动功率决定,电机制动功率越大,意味着电机回收的制动能量越多。这种系统相当于液压制动和电机再生制动并联工作,因此称为并联系统。

图1.5 并联系统的典型硬件构型
Fhf—前轴液压制动力 Fhr—后轴液压制动力 Fm—电机制动力
并联系统在能量回收时,液压制动与电机制动是相互独立的,即在原始液压制动的基础上叠加电机再生制动。由于电机回收能力时刻在变化,即使踏板开度相同,汽车的制动减速度也可能发生变化。基于上述原因,并联系统的电机制动力不宜设置得过大,过大会导致并联系统不能充分发挥电机的制动能力,导致回收的制动能量极为有限,这部分内容在本书第5章还会有详细分析。
为了保证驾驶员的制动感觉及驾驶舒适性,同时尽量发挥电机的再生制动能力,需要在驾驶员踩下制动踏板到某个开度时,让前轴电机首先提供其最大再生制动力,不足部分由液压制动力补偿。
为了实现上述功能,本书在第2章给出了五种硬件构型方案。以其中一种单轴解耦构型为例,其需要在传统液压制动系统的主缸前腔与液压调节单元之间增设踏板感觉模拟器,工作原理如图1.6所示。当驾驶员踩下制动踏板推动制动主缸活塞时,主缸后腔仍直接将制动液输入后轴轮缸,但主缸前腔输入到前轴轮缸的制动液量需要根据此刻前轴的需求制动力进行调节。当前轴需求制动力可全部由电机再生制动力提供时,前轴制动轮缸不需要制动液,此时该构型通过踏板感觉模拟器切断主缸前腔与前轴轮缸间的液压回路,前轴轮缸与主缸实现解耦,制动踏板力推动主缸前腔所排出的制动液全部流入踏板感觉模拟器;当前轴电机再生制动力无法满足全部前轴制动力需求时,需要进行液压制动力补偿,此时主缸前腔将所需补偿的制动液通过液压调节单元输入到前轴制动轮缸,而其余部分仍然流入踏板感觉模拟器。踏板感觉模拟器的作用就是在制动时容纳主缸前腔排出的制动液,同时在常规制动过程中模拟驾驶员的踏板感觉。

图1.6 增设踏板感觉模拟器的液压制动系统工作原理
这种能独立调节前后轮液压制动力,使液压制动力和电机制动力根据总制动需求协调输出,并且能回收更多制动能量的制动能量回收系统即为串联系统。
串联系统的硬件构型如图1.7所示。驾驶员踩下制动踏板到某个开度,液压制动系统工作,使后轴产生液压制动力,同时踏板位移传感器将踏板开度信号转换为电信号输入控制器,控制器根据输入开度信号获得前轴制动需求,计算出此时前轴电机所能提供的制动力以及液压制动系统所需补偿的制动力,并向电机与液压制动系统发出指令,控制电机和液压制动系统产生所需制动力。

图1.7 串联系统的硬件构型
Fhf—前轴液压制动力 Fhr—后轴液压制动力 Fm—电机制动力
串联制动能量回收系统可实现电机与液压制动力的协调控制,可以在保证驾驶员制动感觉及驾驶舒适性的前提下,充分发挥电机的制动能力,提高能量回收效果。此外,对于采用不同的硬件实现形式以及控制算法的串联系统,能量回收效果也不尽相同,这部分内容会在后面章节进行详细分析。