2.3 制导方法
为了限定要求的轨迹计算时间,这里不执行着陆点或TAEM (末端能量管理) 界面目标。相反,再入条件是指定的,而终端条件是自由的。轨迹优化是不划算的,因为需要优化每一个产生的飞行器形状。既然一个单独的轨迹优化将花费相当多的时间,所以这里的方法不可能是划算的。Armel (2007) 和Grant等(2011) 实现了轨迹与形状的耦合优化,但是以一个简化的动力学/空气动力学的模型为代价,经仔细研究,我们认为这不能保证良好的模型保真度。
在轨迹式和有翼飞行器之间,制导和控制方法不同,这部分内容将在2.3.1节和2.3.2节论述。最后,我们在2.3.3节会简要地讨论稳定性问题。纵向的特征通过迎角α被表征,横向的特征通过倾侧角σ被表征,并进行讨论。对于两种类型飞行器,侧滑角β将始终被假设为0。关于姿态角的定义见图2.4。
2.3.1 返回舱
返回舱飞行器通常由反应控制系统 (RCS) 控制,尽管一些使用翼面进行空气动力学控制的概念也有被提及 (Andersen和Whitmore, 2007)。然而,姿态传播将不包括在仿真中,因此控制系统的细节也将不被考虑。相反,飞行器平衡条件会被假定。平衡迎角为

也就是说,该迎角是使俯仰力矩系数 (见3.2节) 等于零的迎角。如果无法找到这样的迎角,飞行器将被标称为不平衡的 (参见第6.3.2节)。在本书中,我们将平衡迎角定义为满足式 (2.37) 的迎角。
对于质心位于中心线上的对称飞行器,平衡姿态将是αtr=0。对于质量中心在z方向上偏移的飞行器,如阿波罗太空舱,平衡的迎角将不为零。如5.1节中所述,这种偏移量也将在这里用作设计变量。由于力矩系数是马赫数的函数,平衡迎角也会取决于马赫数。但是马赫数的系数变化是有限的 (见第7.2.1节)。由于轨迹传播具有3个自由度 (仅为平动度),因此不分析返回舱改变姿态的时间依赖性过程。预期会发生的迎角的微小变化不会明显地影响结果 (假设飞行器是稳定的)。然而,飞行器的姿态稳定性很重要,因为不稳定性将导致飞行器在整个飞行过程中难以保持平衡状态。因此,将对返回舱施加以下静态稳定性条件:

这个关系是否成立取决于质量中心相对于压力中心的位置。该约束将在第6.3.2节中进一步讨论。极端情况下,返回舱分析将会使用两个满足式 (2.37)的迎角,只有满足式 (2.38) 条件的点会被使用。因为这种情况总是有一个可控的和一个不可控的迎角,所以它们总是可控的。
除了俯仰制导,飞行器还需要横向制导,这可以通过对倾斜角度的调节来实现。通过调节这个角度,可以控制升力矢量的方向,从而对飞行轨迹和航迹角产生影响,见方程 (2.31) 和方程 (2.32)。为了防止飞行器脱离大气层,航迹角的控制方式如下:

在式 (2.31) 中,忽略地球自转引起的离心项和径向引力项,可以得到如下关系:

通过设置 ,条件 (2.39) 会被满足,同时保持航迹角尽可能大,这将会增大飞行器的航程。遵循以下方程:
,条件 (2.39) 会被满足,同时保持航迹角尽可能大,这将会增大飞行器的航程。遵循以下方程:

从地球的自转速度 (约为7.27×10 -5rad/s) 可以看出,轨道速度的科里奥利加速度可以达到1.1 m/s2。当考虑到轨道速度的gd- V2/r等于零的这个事实时,可以得出科里奥利项是航迹角导数的一个重要贡献。因此,在倾斜角度的确定中不能忽视这一点。倾斜角根据方程 (2.41) 控制直到cos σ>1,在这一点,飞行器不再有足够的升力保持恒定的航迹角飞行。当出现这种情况时,倾斜角设置为0,它被选择用上面方程的正σ解。这与向左倾斜相对应,如图2.4所示。
2.3.2 有翼飞行器
有翼飞行器将被引导在给定的参考静止点热率qc, s, ref下飞行最长时间,可以被看作是一系列实验飞行器的典型任务剖面。这可以在热流流动和材料行为中产生有价值的信息,有助于未来再入飞行器的设计工作 (Mooij和Hänninen, 2009)。它的优点是允许多种指导定律被解析表达出来。
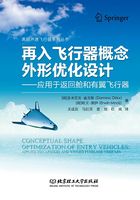
在轨迹的第一部分,飞行器被命令以最大的迎角飞行,以最大限度地减少最大的热流。达到q s, ref启动热流跟踪,引导飞行器保持恒定的驻点热流率。典型的飞行轮廓如图2.7所示,在这个图中,显示了一些时间特征。这些时间是:①t0,初始时间;②t1,最大驻点加热;③t2,初始的热流跟踪;④t3,最终的热流追踪;⑤t4,超声速再入阶段结束 (M<3)。

图2.7 描述制导方法的典型热流剖面
如果热速率t1小于qc, s, ref,热速率加热峰值将跟踪。在这种情况下,t1和t2会重合。类似的方法可以在轨迹的末端用来保持恒定的动压,因为两者都依赖于保持常数:

其中n≈6 [精确值取决于模型的选择,见方程 (3.77)] 为常数热率,n=2表示动态压力恒定。对时间求一阶导数会得到以下结果:

为了实现这个条件,我们对α进行了调整,使其强制满足式 (2.44),可参见方程 (2.30),调整倾斜角以满足方程 (2.41)。
图2.7热流剖面对应的迎角剖面如图2.8所示,α的最小值和最大值分别为10°和40°。从图2.8中可以看出,热流跟踪的起始对应的是迎角减小的起始,跟踪的结束对应的是迎角最小。

图2.8 所描述制导方法的典型迎角剖面
忽略由于地球自转引起的离心力项,以及引力加速度的纵向依赖性,将式(2.44) 代入式 (2.35),则导致阻力的关系为

从飞行器的空气动力系数数据库和飞行条件来看,这个阻力值可以与所需的迎角相匹配。为了避免迎角的不连续性,施加一个最大的迎角速率。采用襟翼和升降副翼对飞行器进行主动俯仰控制。因为只有对称性 (β=0) 被考虑,有关垂直中心平面的对称性、偏航和滚动力矩才会为零。该制导方案将尝试通过襟翼和升降副翼来减小俯仰力矩。首先,尝试只用襟翼修正。如果失败,再使用升降副翼。结果δbf和δe引出下列表达式值的空气动力系数:

如果控制系统不满足力矩系数的最终为非零条件,则在优化过程中这个解决方案被标记为不可行。此外,在模拟中不包含姿态变化所依赖的时间过程,而且控制面偏转假定是瞬间发生的。
侧向制导的执行方式与返回舱飞行器类似,基于方程 (2.39) 的倾斜角度调制,得到方程 (2.41)。再次强调,这是为了防止飞行器从大气中逃逸。由于有翼飞行器升力高,如果没有倾斜角调制,非常有可能发生这种情况。在方程(2.31) 中,只有当升力成为主导项时才启动倾斜角度调制。再入的初始部分密度非常低,所以与其他力相比,升力不会对飞行器的行为产生重大影响。
2.3.3 飞行器稳定性
与再入飞行器的控制能力和特性有关的是其姿态稳定特性。尽管这里对姿态稳定性的分析比较简单 (因为在轨迹传播中不包含转动运动),但还是使用了一些一般飞行器的特性来表示稳定性。
当讨论稳定性时,有两种不同的类型,即静态和动态。关于静态飞行器稳定性,只考虑飞行器向平衡位置移动的趋势,而动态稳定性则考虑所涉及的时变过程。当飞行器被修正时,平衡姿态对应于它当前的姿态,因为质心与压力中心重合,因此这一点的力矩为零。
我们要考虑当引入压力中心和质量中心之间的细微差别时,飞行器的姿态会发生什么变化。当目前姿态稍微偏离平衡时,如果飞行器有返回平衡位置的趋势,则被认为是静态稳定的。这种行为以若干稳定性导数为特征,这些导数表示由姿态的变化而产生的力矩。Cmα, Clβ, Cnβ三个稳定性导数分别表示由于迎角、侧滑角、侧滑角的变化所引起的俯仰、滚转、偏航力矩的变化,分别为

 的值是对飞行器俯仰稳定性的一种度量。为了明确这一点,考虑了飞行器的迎角从平衡位置稍微增加时的情况。如果这导致Cm值增加 (对应于正
的值是对飞行器俯仰稳定性的一种度量。为了明确这一点,考虑了飞行器的迎角从平衡位置稍微增加时的情况。如果这导致Cm值增加 (对应于正 ),则将导致一个正值
),则将导致一个正值 ,这进一步增加了迎角和Cm等。因此,俯仰运动的平衡点是不稳定的。类似地,侧滑角的偏差不能导致偏航或滚动力矩增加。
,这进一步增加了迎角和Cm等。因此,俯仰运动的平衡点是不稳定的。类似地,侧滑角的偏差不能导致偏航或滚动力矩增加。
控制面挠度对飞行器稳定性的影响是相当大的。具体地说,控制面的上下挠度对俯仰力矩导数的贡献是不同的。Hirschel和Weiland (2009) 对此给出了一个清晰的解释,他们分析了一个底部带有控制面的平板。一般来说,一个向上的控制面偏转将有助于稳定飞行器的俯仰,而一个向下的偏转将降低俯仰稳定性。然而,由于向下的偏转控制面会增加飞行器的升阻比L/D,因此必须在这些相互冲突的需求之间进行权衡。该权衡的优化结果将在第9.2节中讨论。
关于动态稳定性,必须考虑姿态动力学的动态特性。然而,这种行为的特征是由涉及姿态速率、包含力矩和惯性积的量的力矩系数的导数表征的。为了包含这些问题,轨迹模拟可以扩展到6个自由度,包括姿态传播。这种分析的扩展将引入动态所需的气动导数。高超声速飞行器的内嵌牛顿法 (Ericsson, 1975; East和Hutt, 1988) 在我们使用的方法中,是一个很好的候选方法。另外,McNamara等 (2010) 描述的高超声速非刚性结构的理论也可以被采用。此外,姿态动力学需要知道飞行器的惯性张量。这就需要扩展质量模型,因为这时需要特定的质量分布。额外需要的计算成本将是巨大的,这也在一定程度上增加了模型的保真度。因此,我们在这里只考虑静态稳定性。